|
Srinath Mahankali I am a robot learning PhD student at UC Berkeley, advised by Pieter Abbeel and Sergey Levine. Previously, I was a research engineer at Eka Robotics, where I built sim-to-real dexterous manipulation systems. Before that, I finished my undergraduate at MIT, researching exploration in deep RL and energy-efficient quadruped locomotion with Pulkit Agrawal. I also worked on inverse problems with Yunan Yang and on the linear separability of neural networks with Promit Ghosal. Email / CV / Google Scholar / LinkedIn |

|
Updates
|
Research |
|
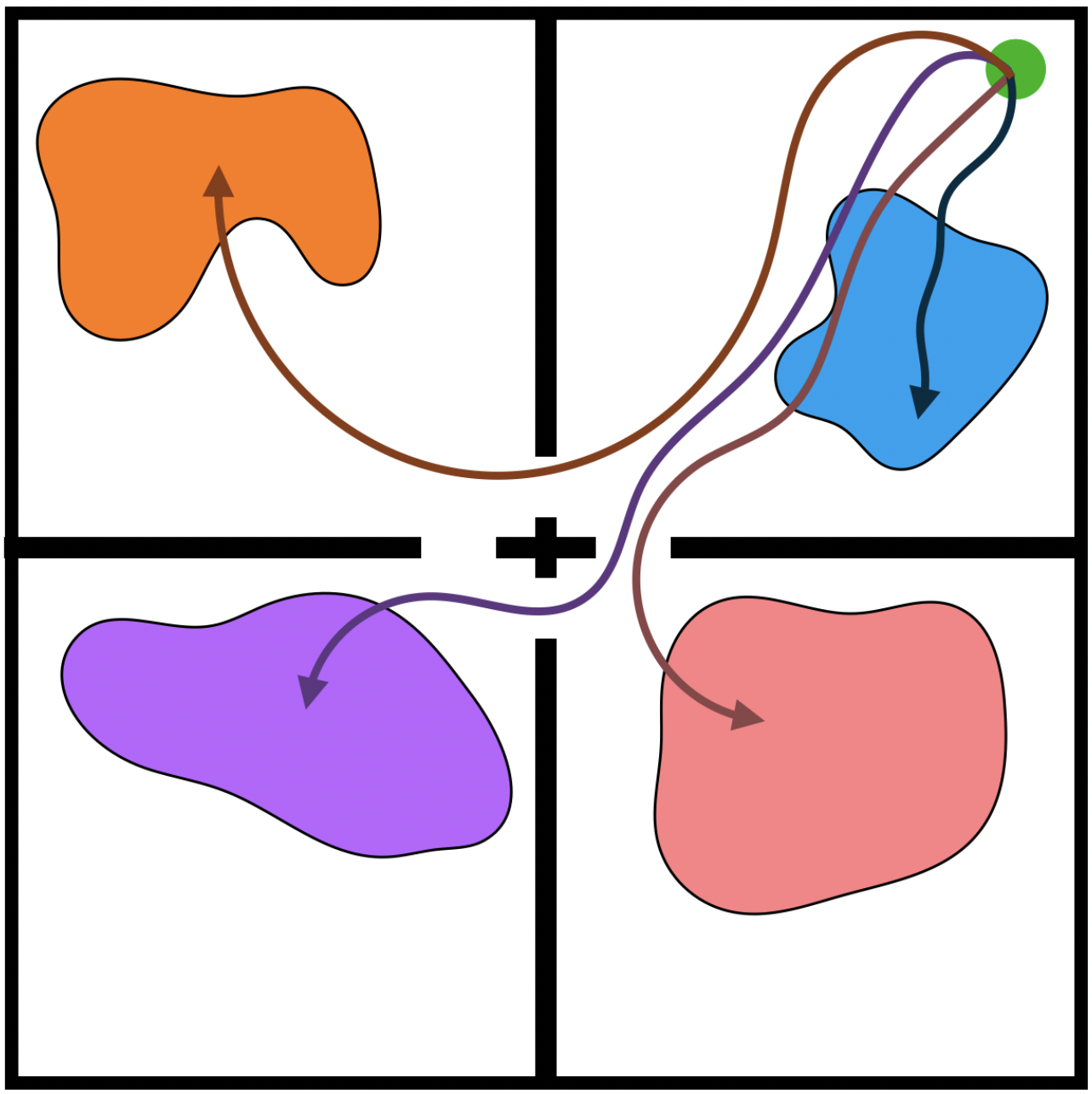
Random Latent Exploration for Deep Reinforcement Learning
Srinath Mahankali, Zhang-Wei Hong, Ayush Sekhari, Alexander Rakhlin, Pulkit Agrawal ICML, 2024 project page / paper / abstract We improve exploration in both discrete and continuous control domains by optimizing random reward functions parameterized by a sampled latent vector. |
|
Maximizing Quadruped Velocity by Minimizing Energy
Srinath Mahankali*, Chi-Chang Lee*, Gabriel B. Margolis, Zhang-Wei Hong, Pulkit Agrawal ICRA, 2024 project page / paper We train energy-efficient policies for quadruped locomotion tasks while improving task performance through constrained reinforcement learning. |
|
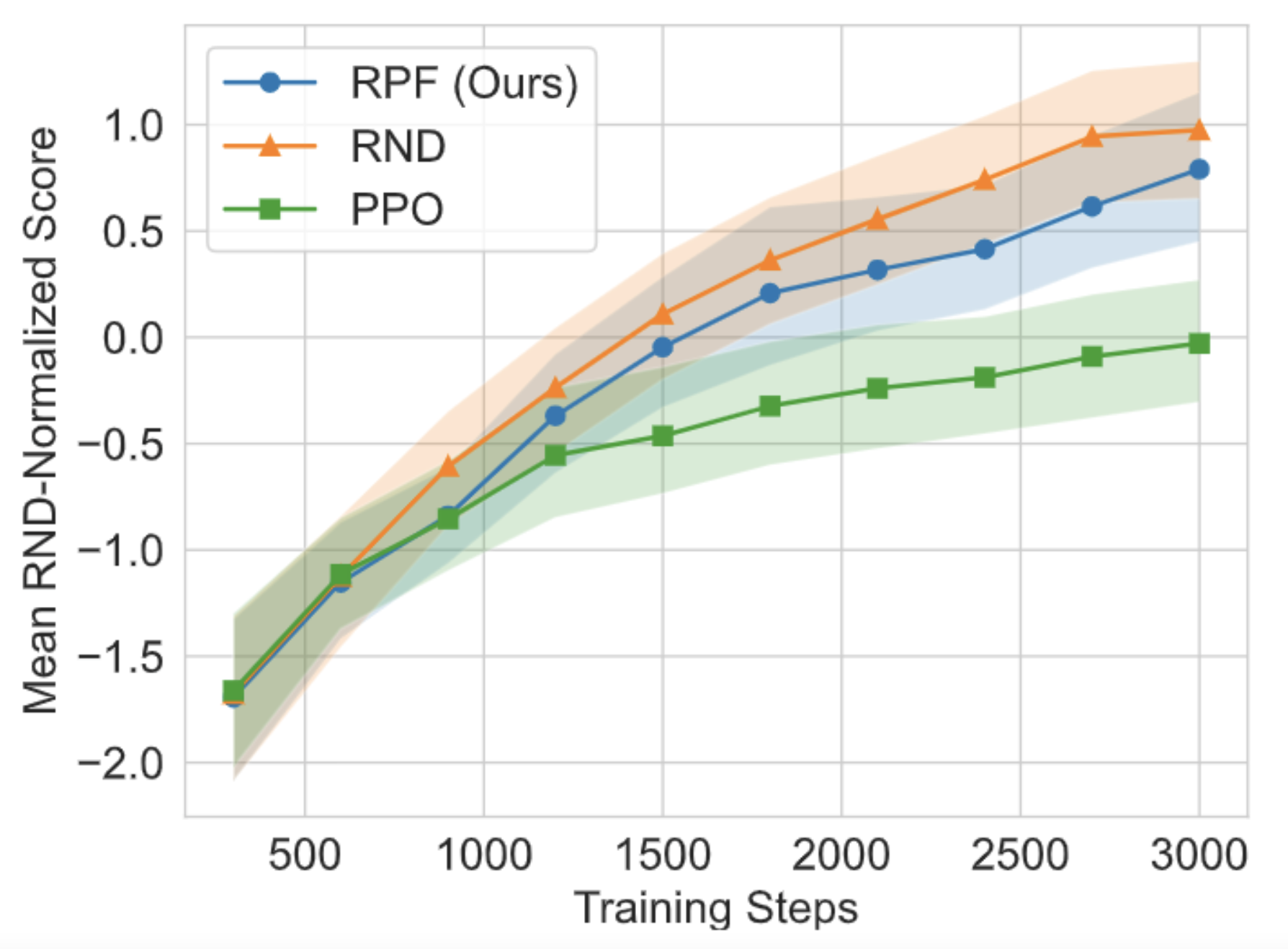
Does Novelty-Based Exploration Maximize Novelty?
Srinath Mahankali, Zhang-Wei Hong, Pulkit Agrawal preprint, 2023 paper Randomly generated rewards can explain a significant fraction of exploration improvements from novelty-based intrinsic motivation. |
|
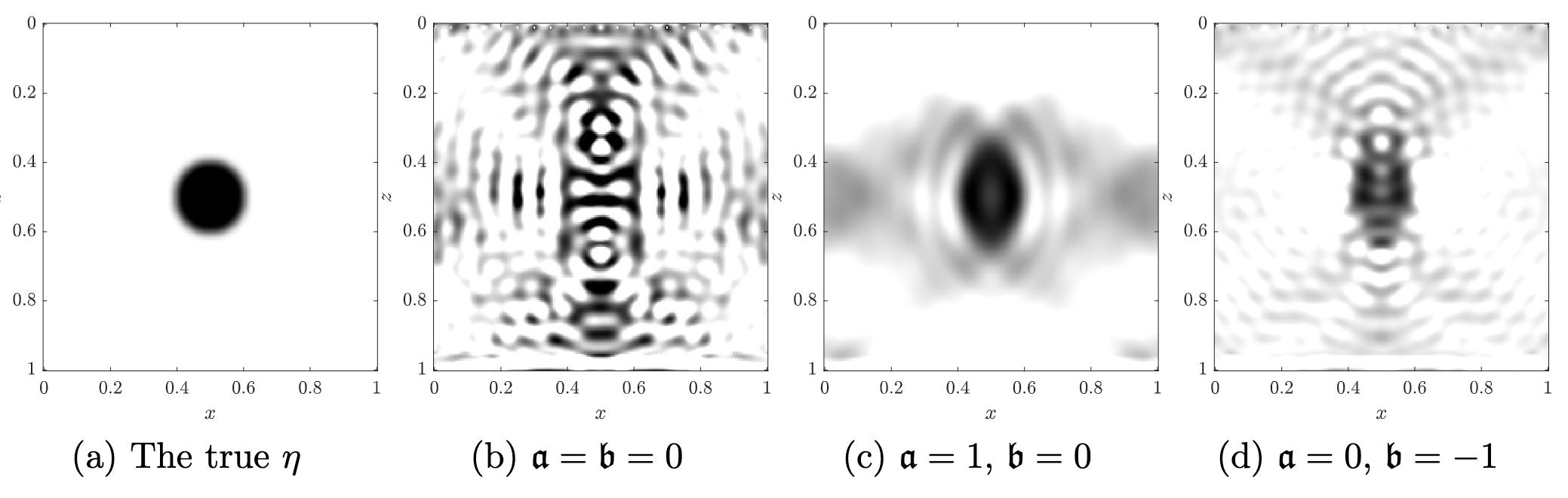
Norm-dependent convergence and stability of the inverse scattering series for diffuse and scalar waves
Srinath Mahankali, Yunan Yang Inverse Problems, 2023 paper / abstract We prove bounds on the convergence and stability of the inverse scattering series under different Sobolev norms, finding conditions under which the radius of convergence and stability are improved. |
|
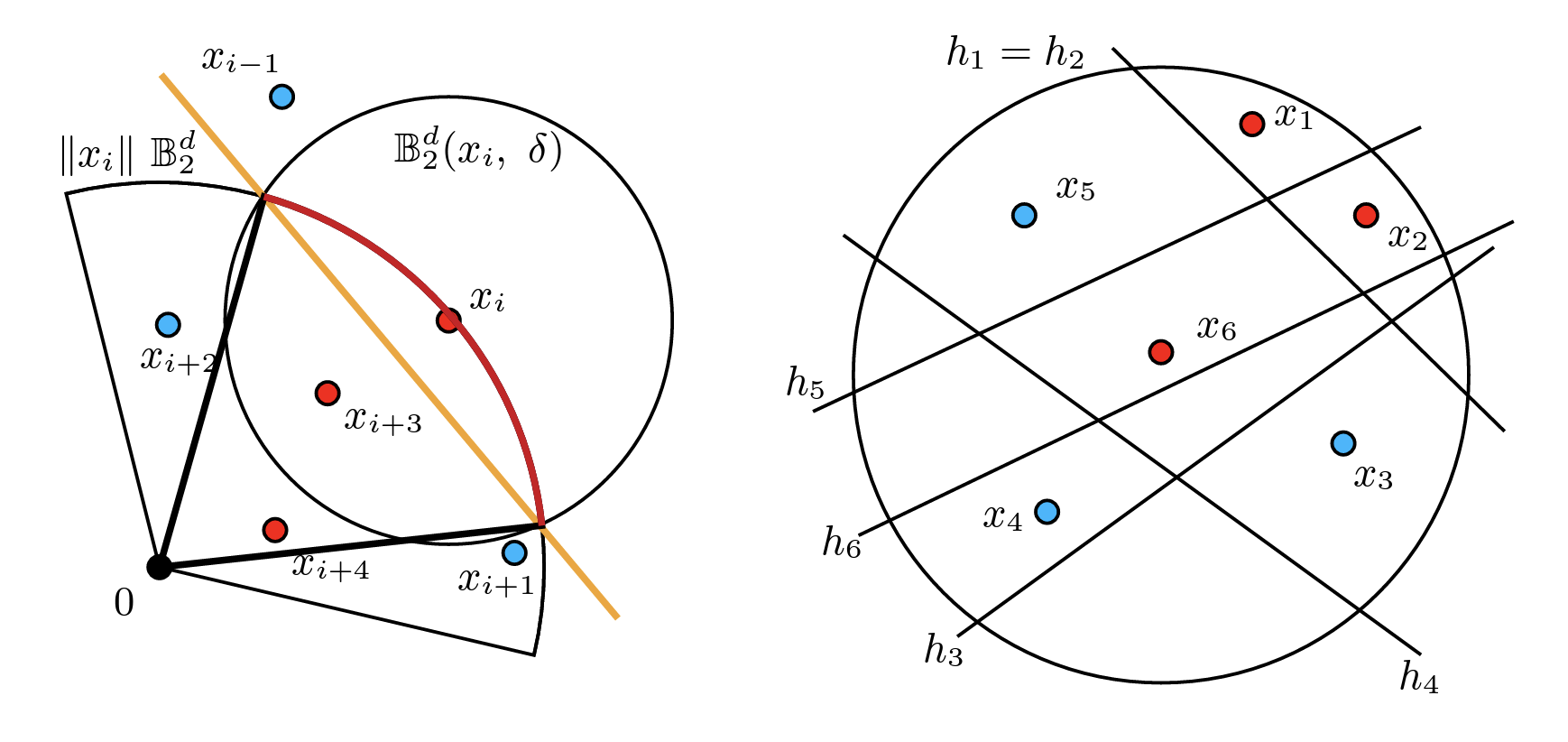
Randomly Initialized One-Layer Neural Networks Make Data Linearly Separable
Promit Ghosal, Srinath Mahankali, Yihang Sun arXiv preprint, 2022 paper / abstract Randomly initialized one-layer neural networks, with high probability, make datasets linearly separable. |
|
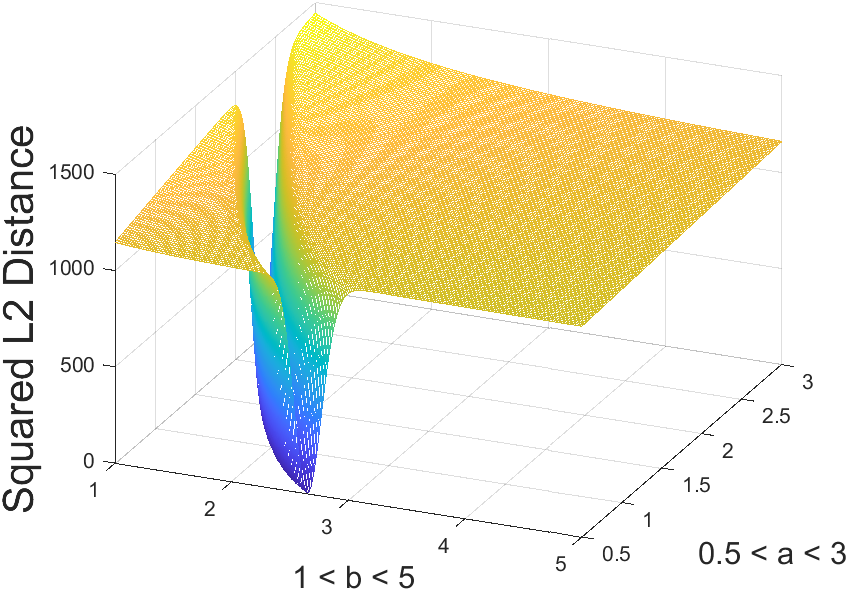
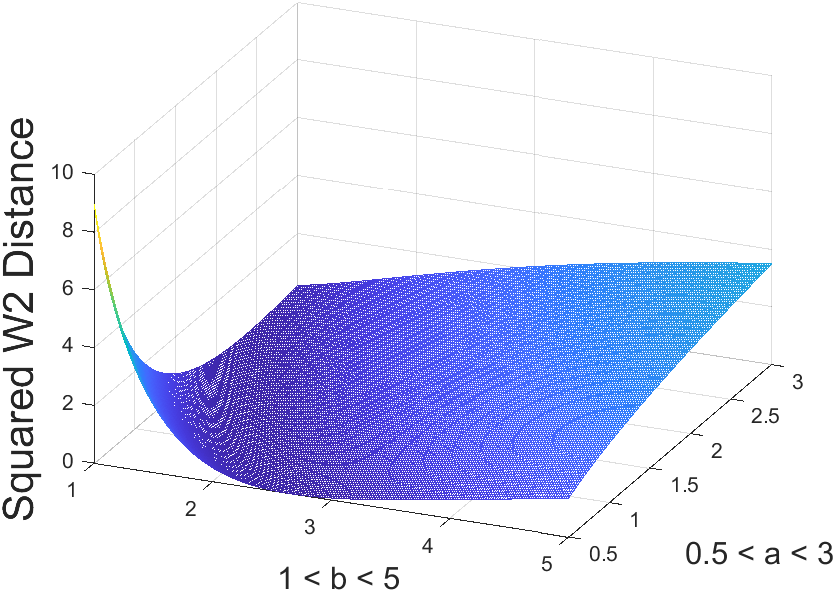
The convexity of optimal transport-based waveform inversion for certain structured velocity models
Srinath Mahankali SIAM Undergraduate Research Online, 2021 paper / abstract Full waveform inversion with an optimal transport-based objective has superior convexity compared to the standard least-squares objective function for certain velocity models. |
|
Design and source code from Jon Barron's website. |